1.4 向量的线性关系 (cont’d)
线性相关:向量组合 $= \boldsymbol 0$ 的方程只有平凡解,则线性无关,否则线性相关。
$\ge 2$ 个向量线性相关 $\Leftrightarrow$ 存在一个向量是其他向量的线性组合
可以转换成向量形成的系数矩阵的简化阶梯型没有全零行,或者行列式等于零
1.5 标架与坐标
标架:给定 有序 向量作为坐标轴,这些向量整体叫做标架
- 笛卡尔标架:向量均为单位向量
- 笛卡尔直角标架:向量均为单位向量,且两两垂直
- 放射标架:无要求
- 右手/左手标架:三维标架中,坐标轴顺序为拇指、食指、中指
- 工程上经常用右手标架,计算机有时用左手标架
坐标:给定标架,某个向量关于这个标架的线性组合系数。记为 $\boldsymbol r {x, y, z}$
如果是点坐标,就写作 $P(x, y, z)$
坐标系:向量/点与坐标的一一对应关系。
常用 ${O; \boldsymbol{i, j, k}}$ 表示直角坐标系,其中 $O$ 表示坐标原点,$\boldsymbol{i, j, k}$ 表示单位坐标向量
坐标原点、坐标向量
坐标轴:坐标向量所在的直线
坐标面:每两条坐标轴决定的平面。直角坐标系中,各坐标面垂直。
三维坐标系中:
卦限:由坐标面分成的八个区域($z$ 先正后负,$x, y$ 和平面的象限顺序一样)
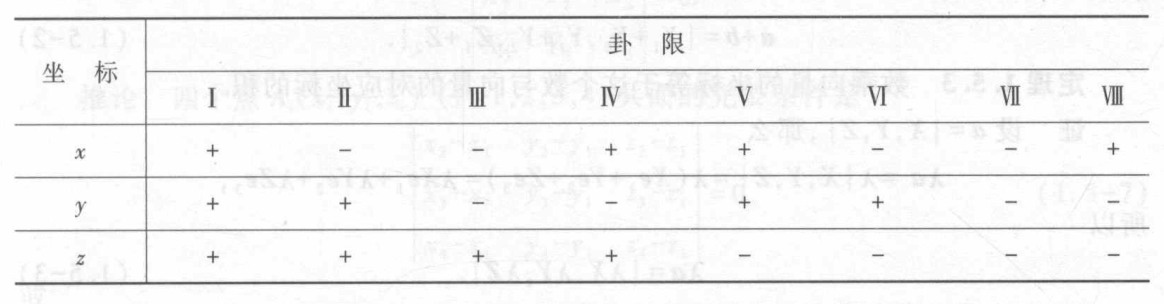 $x, y, z$:横坐标、纵坐标、竖坐标
$x, y, z$:横坐标、纵坐标、竖坐标
坐标分解式:$\boldsymbol r = x \boldsymbol i + y\boldsymbol j + z \boldsymbol k = {x, y, z}$
向量的运算:
- 向量的坐标,等于终点坐标减去始点坐标
- 两向量和的坐标,等于两向量坐标对应相加
- 数乘向量的坐标,等于向量每个坐标乘以该数
共线与共面 两个非零向量 ${x_1, y_1, z_1}, {x_2, y_2, z_2}$ 共线 $\Leftrightarrow$ $\displaystyle \frac{x_1}{x_2} = \frac{y_1}{y_2} = \frac{z_1}{z_2}$(忽略 $\displaystyle \frac{0}{0}$)
三个点 $(x_1, y_1, z_1), (x_2, y_2, z_2), (x_3, y_3, z_3)$ 共线 $\Leftrightarrow$ $\displaystyle \frac{x_2 - x_1}{x_3 - x_1} = \frac{y_2 - y_1}{y_3 - y_1} = \frac{z_2 - z_1}{z_3 - z_1}$
三个非零向量 ${x_1, y_1, z_1}, {x_2, y_2, z_2}, {x_3, y_3, z_3}$ 共面 $\Leftrightarrow$ $\displaystyle \begin{vmatrix}x_1&y_1&z_1\\x_2&y_2&z_2\\x_3&y_3&z_3\end{vmatrix}=0$
(用线性相关的充要条件来证)
四个点 $(x_1, y_1, z_1), (x_2, y_2, z_2), (x_3, y_3, z_3), (x_4, y_4, z_4)$ 共面 $\Leftrightarrow$ $\begin{vmatrix}x_2-x_1&y_2-y_1&z_2-z_1\\x_3-x_1&y_3-y_1&z_3-z_1\\x_4-x_1&y_4-y_1&z_4-z_1\end{vmatrix}=0$
定比分点:给定 $P_1(x_1, y_1, z_1), P_2(x_2, y_2, z_2)$,那么 $\overline{P_1P_2}$ 的成定比 $\lambda (\lambda \ne -1)$ $P$ 的坐标为 $$\left( \frac{x_1 + \lambda x_2}{1 + \lambda}, \frac{y_1 + \lambda y_2}{1 + \lambda}, \frac{z_1 + \lambda z_2}{1 + \lambda} \right)$$ 令 $\lambda = 1$,得中点坐标公式。
1.6 向量在轴上的射(投)影
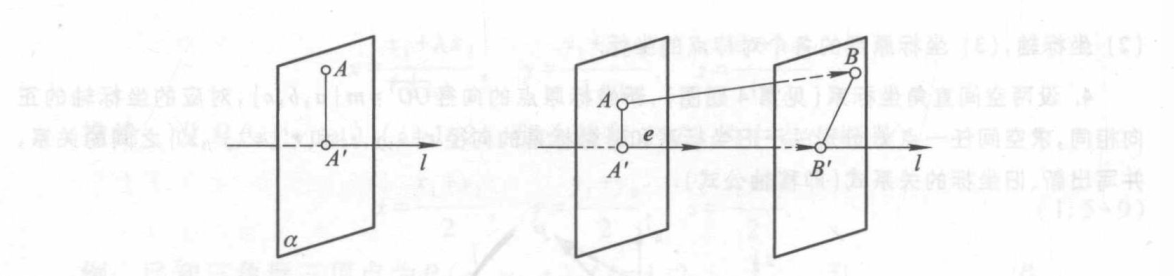
点在轴上的射影:过 $A$ 做轴 $l$ 的平面 $\alpha$,那么 $\alpha$ 与 $l$ 的交点 $A’$ 就是 $A$ 在 $l$ 的射影。
向量在轴上的射影:向量的始点和终点分别对轴做射影得到的新向量,记作射影向量 $_l \overline{AB} = \overline{A’B’}$
 夹角:两向量 $\overline{OA}, \overline{OB}$ 的 $\in [0, \pi]$ 的夹角记作 $\angle (\boldsymbol{a, b})$
夹角:两向量 $\overline{OA}, \overline{OB}$ 的 $\in [0, \pi]$ 的夹角记作 $\angle (\boldsymbol{a, b})$
射影定理:$射影_l \overrightarrow{AB} = |\overrightarrow{AB}| \cos \theta$,其中 $\theta = \angle(l, \overrightarrow{AB})$
- 同向:$0 \le \theta < \frac{\pi}{2}$,射影为正数
- 垂直:$\theta = \frac{\pi}{2}$,射影为零
- 反向:$\frac{\pi}{2} < \theta \le \pi$,射影为负数
相等向量在同一轴上的射影相等。
射影的运算:
- $射影_l(\boldsymbol a + \boldsymbol b) = 射影_l \boldsymbol a + 射影_l \boldsymbol b$,可推广到有限多个的加法
- $射影_l(\lambda \boldsymbol a) = \lambda 射影_l \boldsymbol a$
射影与坐标的关系:在直角坐标系 ${O; \boldsymbol{i, j, k}}$ 下,向量 $\boldsymbol a$ 的坐标为 $${射影_i \boldsymbol a, 射影_j \boldsymbol a, 射影_k \boldsymbol a}$$
1.7 两向量的数量积
数量积/内积:$\boldsymbol a · \boldsymbol b = |\boldsymbol a||\boldsymbol b| \cos\angle(\boldsymbol a, \boldsymbol b)$