2.2 连续时间 LTI 系统:卷积积分
对于连续时间 LTI 系统:$T\{x(t)\} = y(t)$,假设系统对于单位冲激信号的响应为 $T\{\delta(t)\} = h(t)$,那么我们可以将任意输入信号拆分为位移的单位冲击信号线性组合,那么响应信号为位移的 $h(t)$ 的信号线性组合
$$x(t) = \int_{-\infty}^{+\infty} x(\tau) \delta(t - \tau) \mathrm d\tau = x(t) * \delta(t)$$
$$y(t) = T\{x(t)\} = \int_{-\infty}^{+\infty} x(\tau) \delta(t - \tau) \mathrm d\tau = x(t) * h(t)$$
连续时间 LTI 系统可以完全由它的单位冲击响应 $h(t)$ 来表征。
求卷积和 $\displaystyle y(t) = x(t) * h(t) = \int_{-\infty}^{+\infty} x(\tau) \delta(t - \tau) \mathrm d\tau$ 的步骤:
- 取 $x(\tau)$ 和 $h(\tau)$,其中 $\tau$ 是变量。
- 将 $h(\tau)$ 翻转,变为 $h(-\tau)$。
- 假设现在要算 $y(t)$,我们固定 $t$,则:
- 将 $h(-\tau)$ 平移 $t$(正则右移 $|t|$,负则左移 $|t|$),变为 $h(-(\tau - t)) = h(t - \tau)$
- 计算 $x(t)·h(t - \tau)$ 积分,最终得到 $y(t)$ 的值。
2.3 线性时不变系统的性质
2.3.1 卷积相关
(1)交换律:输入信号与单位脉冲响应信号可以互换。
- $x[n] * u[n] = h[n] * x[n]$
- $x(t) * h(t) = h(t) * x(t)$

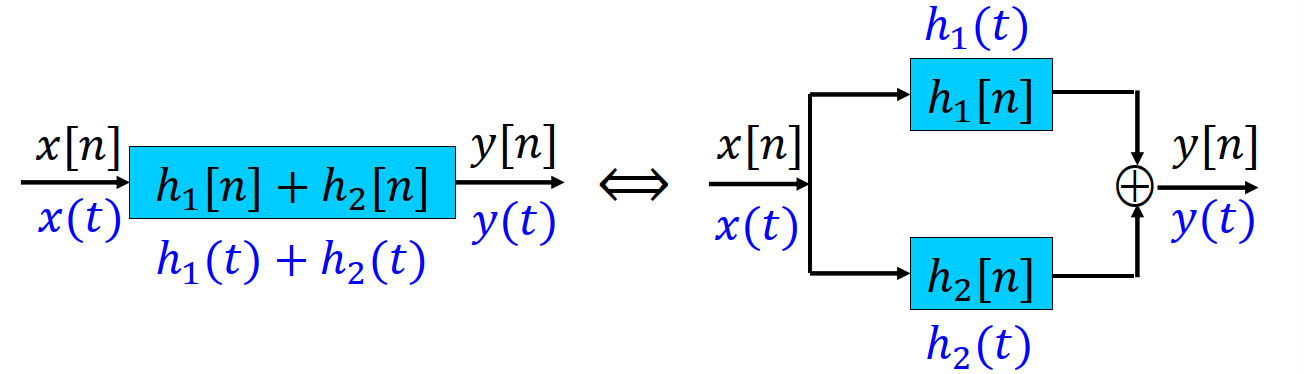
(2)分配律:并联 系统的单位冲激响应等于各子系统单位冲激响应之和。
- $x[n] * (h_1[n] + h_2[n]) = x[n] * h_1[n] + x[n] * h_2[n]$
- $x(t) * (h_1(t) + h_2(t)) = x(t) * h_1(t) + x(t) * h_2(t)$
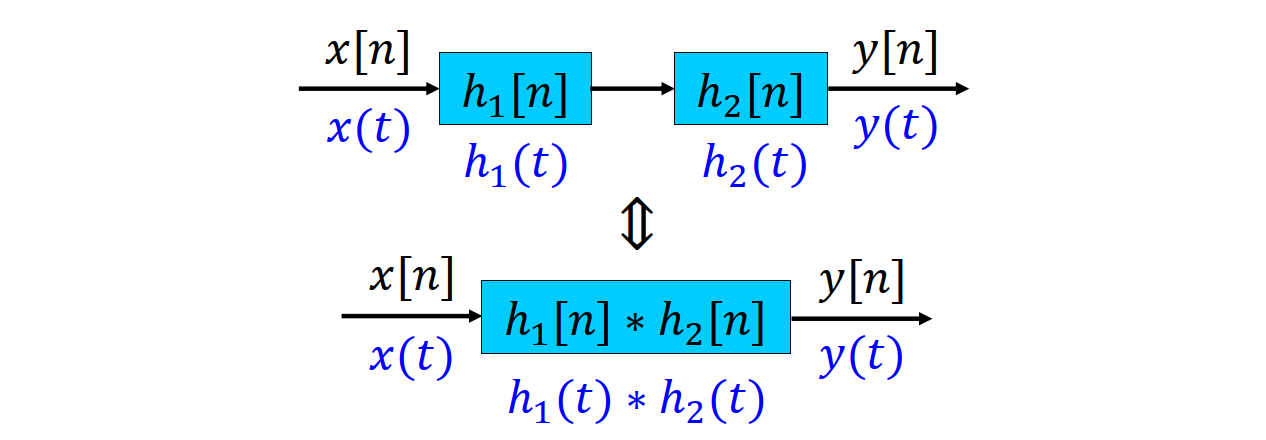
(3)结合律:级联 系统的单位冲激响应等于各子系统单位冲激响应的卷积。
- $(x[n] * h_1[n]) * h_2[n] = x[n] * (h_1[n] * h_2[n])$
- $(x(t) * h_1(t)) * h_2(t) = x(t) * (h_1(t) * h_2(t))$
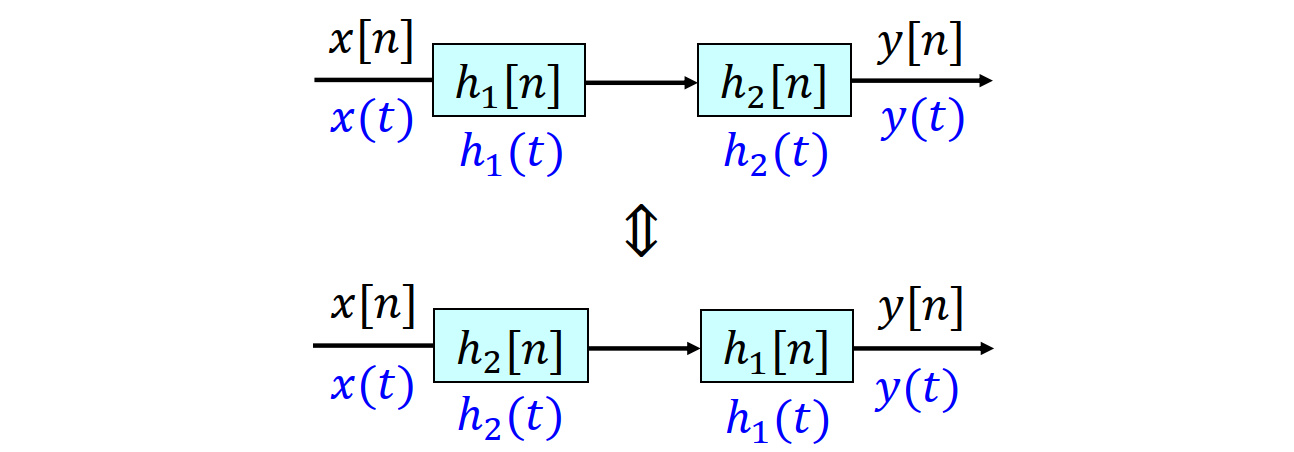
(4)交换律与结合律的推论:级联系统中,各子系统的先后次序可以调换。
- $(x[n] * h_1[n]) * h_2[n] = (x[n] * (h_2[n]) * h_1[n]$
- $(x(t) * h_1(t)) * h_2(t) = (x(t) * (h_2(t)) * h_1(t)$
- 以上成立的前提:$h_1[n], h_2[n]$ 都是 LTI 系统,并且每一步的卷积都收敛(每一步中间信号都必须存在)。
(5A)卷积积分的性质:满足微分、积分、时移
- 微分:$\displaystyle x’(t) * h(t) = x(t) * h’(t) = y’(t)$
- 累次微分:$\displaystyle x^{(m)}(t) * h^{(n)}(t) = y^{(m+n)}(t)$
- 积分:$\displaystyle \left( \int_{-\infty}^{t} x(\tau), d\tau \right) * h(t) = x(t) * \left( \int_{-\infty}^{t} h(\tau), d\tau \right) = \int_{-\infty}^{t} y(\tau), d\tau$
- 时移:$\displaystyle x(t-t_0) * h(t) = x(t) * h(t-t_0) = y(t-t_0)$
(6)卷积和的性质:满足差分、前缀和、时移
- 差分:$\displaystyle (x[n]-x[n-1]) * h[n] = x[n] * (h[n]-h[n-1]) = y[n]-y[n-1]$
- 前缀和:$\displaystyle \left(\sum_{k=-\infty}^{n} x[k]\right) * h[n] = x[n] * \left(\sum_{k=-\infty}^{n} h[k]\right) = \sum_{k=-\infty}^{n} y[k]$
- 时移:$\displaystyle x[n-n_0] * h[n] = x[n] * h[n-n_0] = y[n-n_0]$
单位冲激响应相关
(1)记忆性:LTI 系统无记忆的 充要条件 为,单位脉冲响应信号为 $h[n] = k \delta[n]$ 或 $h(t) = k \delta(t)$,此时 $$x[n] * h[n] = kx[n],\quad x(t) * h(t) = kx(t)$$
(2)可逆性:若 LTI 系统是可逆的,那么它的逆系统也是可逆的,此时 $$h[n] * g[n] = \delta[n],\quad h(t) * g(t) = \delta(t)$$ (3)因果性:
- LTI 系统具有因果性的 充要条件 为,单位脉冲响应的负数域的部分均为 $0$ $$\forall n < 0,\ h[n] = 0,\quad \forall t < 0,\ h(t) = 0$$
- 初始松弛条件:对于任意时刻,只要该时刻之前系统的输入为0,则该时刻之前系统的输出也必然为0。该条件与因果性的充要条件等价。
(4)稳定性:假设输入信号 $x[n]$ 有界,即 $|x[n]| \le A$,则有 $$|y[n]| = \left| \sum_{k = -\infty}^{\infty}h[k]x[n - k] \right| \le A \sum_{k = -\infty}^{+\infty}|h[k]|$$
- 对于离散时间 LTI 系统,若 $\displaystyle \sum_{k = -\infty}^{+\infty}|h[k]|$ 收敛则系统稳定。
- 对于连续时间 LTI 系统,若 $\displaystyle \int_{-\infty}^{+\infty} |h(t)|\mathrm dt$ 收敛则系统稳定。
用单位阶跃响应描述系统:也常用系统对单位阶跃函数输入信号的响应来 表述 LTI 系统,记作 $s[n]$ 或 $s(t)$,那么可见 $s[n]$ 是 $h[n]$ 的前缀和,$s(t)$ 是 $h(t)$ 的前缀积分 $$s[n] = \sum_{k = \infty}^{n} h[k], \quad s(t) = \int_{-\infty}^{t}h(\tau)\mathrm d\tau$$
2.4 用微分和差分方程描述的因果 LTI 系统
2.4.1 线性常系数微分方程
线性常系数微分方程:$$\sum_{k = 0}^N a_k \frac{\mathrm d^k y(t)}{\mathrm d t^k} = \sum_{k = 0}^M b_k \frac{\mathrm d^k x(t)}{\mathrm d t^k},\quad a_k, b_k \in \mathbb R$$ 它的解是齐次解和特解之和:$y(t) = y_p(t) + y_h(t)$,其中 $y_h(t)$ 是齐次方程解 $$\sum_{k = 0}^N a_k \frac{\mathrm d^k y(t)}{\mathrm d t^k} = 0$$ 可以通过特征方程求解得到。
对两边同时积分并转换为递推形式可得:$$y(t) = \frac{1}{a_N} \left( \sum_{k = 0}^M b_k x_{(N - k)}(t) - \sum_{k = 0}^{N - 1} a_k y_{(N - k)}(t) \right)$$ 初始条件分为两种,初始松弛→零输入相应为零,非零起始状态则增量线性
2.4.2 线性常系数差分方程
线性常系数差分方程:$$\sum_{k = 0}^N a_k y[n -k] = \sum_{k = 0}^M b_kx[n - k]$$ 它的解是齐次解和特解之和 $y[n] = y_h[n] + y_p[n]$。
可以转写成递推形式:$$y[n] = \frac{1}{a_0} \left( \sum_{k = 0}^M b_k x[n - k] - \sum_{k = 1}^N a_k y[n - k] \right)$$
有限脉冲响应(FIR):非递归方程 $$y[n] = \frac{1}{a_0}\sum_{k = 1}^N a_k y[n - k] $$
无限脉冲响应:有限脉冲响应的补集,具有无限长的单位脉冲响应。
对于差分方程,它的特解也是齐次解和特解之和。其中特解对应受迫响应部分,齐次解对应自由响应部分。
线性常系数差分或微分方程对应 增量线性系统,它的响应等于零状态响应与零输入相应组成。
2.5 奇异函数
$\delta(t)$ 不是一般能够用解析式表达的函数,只能通过它对其他信号的作用来定义。
用卷积定义 $\delta(t)$:$\delta(t)$ 是恒等系统的单位冲激响应信号,满足 $$T\{x(t)\} = x(t) * \delta(t) = x(t),\quad \forall x(t)$$
用积分定义 $\delta(t)$:$\delta(t)$ 是与任何信号卷积在 $t = 0$ 处的值不变的信号,即 $$g(0) = \int_{-\infty}^{+\infty} g(\tau) \delta(\tau) \mathrm d\tau,\quad \forall g(t)$$ $\delta(t)$ 的性质:
- $\displaystyle \int_{-\infty}^{+\infty} \delta(\tau)\mathrm d\tau = 1 * \delta(t) = 1$
- $f(t)\delta(t) = f(0)\delta(t)$
- $\delta(t) = \delta(-t)$
- $\displaystyle \delta(at) = \frac{1}{|a|}\delta(t)$
单位冲击偶:$\displaystyle u_{1}(t) = \frac{\mathrm d\delta(t)}{\mathrm dt}$
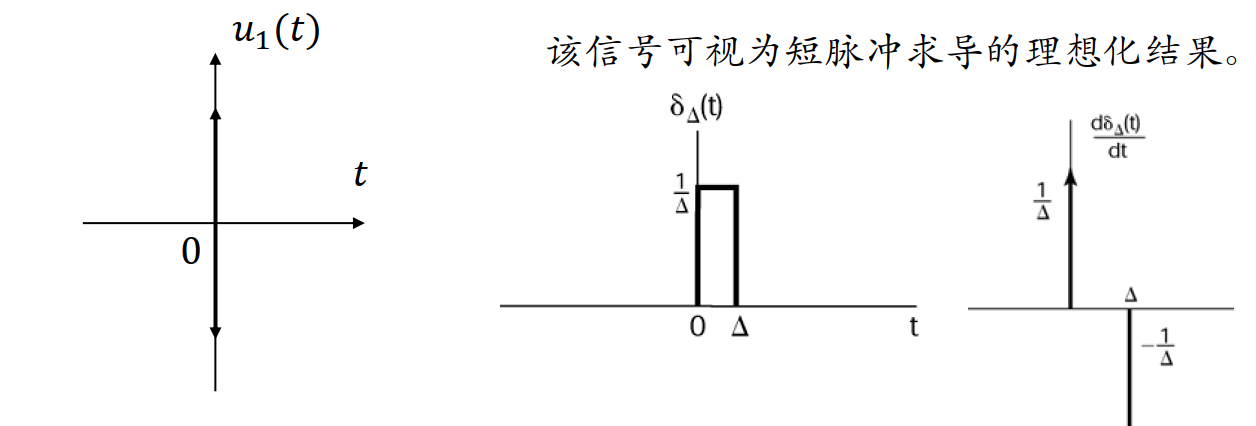
单位冲击偶的性质:
- $\displaystyle \int_{-\infty}^{+\infty}u_1(t) \mathrm dt = 0$
- $\displaystyle \forall g(t),, \int_{-\infty}^{+\infty} g(\tau - t)u_1(\tau)\mathrm d\tau = \frac{\mathrm dg(-t)}{\mathrm dt}= -g’(-t)$
- $\displaystyle \forall g(t),, \int_{-\infty}^{+\infty} g(\tau)u_1(\tau)\mathrm d\tau = -g’(0)$,可以视作在积分意义下的定义
- $u_k(t) = \underbrace{u_1(t)u_1(t)\cdots*u_1(t)}_{k}$
理想积分器:$\displaystyle u_{-1}(t) = \int_{-\infty}^{t} \delta(\tau)\mathrm d\tau = u(t)$
理想积分器的性质:
- $\displaystyle \forall g(t),, \int_{-\infty}^{+\infty} g(\tau)u_{-1}(\tau)\mathrm d\tau = \int_{-\infty}^{t} x(\tau)\mathrm d\tau$,可以视作在积分意义下的定义
- $u_{-k}(t) = \underbrace{u_{-1}(t)u_{-1}(t)\cdots*u_{-1}(t)}_{k}$
单位斜坡函数:$u_{-2}(t) = u_{-1}(t) * u_{-1}(t) = tu(t)$
单位斜坡函数的性质:
- 两次累次积分:$\displaystyle \forall g(t),, \int_{-\infty}^{+\infty} g(\tau)u_{-2}(\tau)\mathrm d\tau = \int_{-\infty}^{t} \left(\int_{-\infty}^{\tau}x(\sigma)\mathrm d\sigma\right)\mathrm d\tau$,可以视作在积分意义下的定义