1.4 单位冲击与单位阶跃函数 (cont’d)
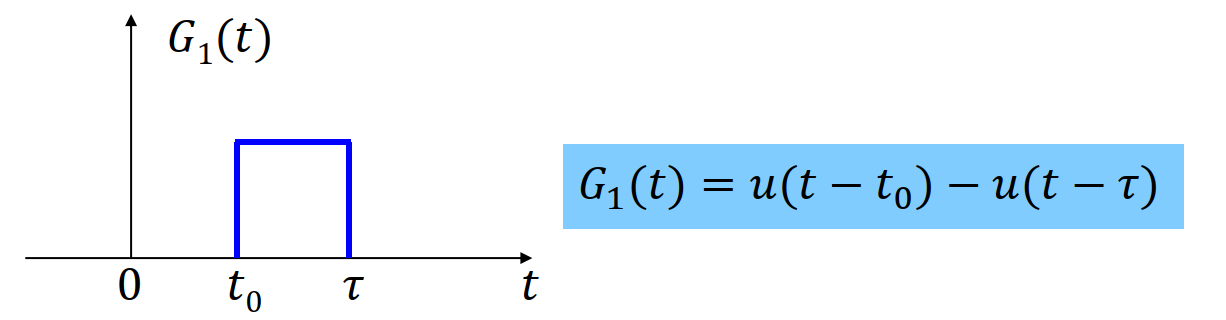
矩形脉冲:
- $\displaystyle G(t) = u(t) - u(t - \tau) = \begin{cases}1,& 0 <t <\tau \\ 0 ,& \text{otherwise}\end{cases}$
- $\displaystyle G(t) = u(t - t_0) - u(t - \tau) = \begin{cases}1,& t_0 <t <\tau \\ 0 ,& \text{otherwise}\end{cases}$
和冲激函数有关的信号:
- $\displaystyle \int_{-\infty}^{+\infty} f(t) \delta(t) \mathrm dt = f(0)$
- $\displaystyle \int_{-\infty}^{+\infty} f(t - t_0) \delta(t) \mathrm dt = f(t_0)$
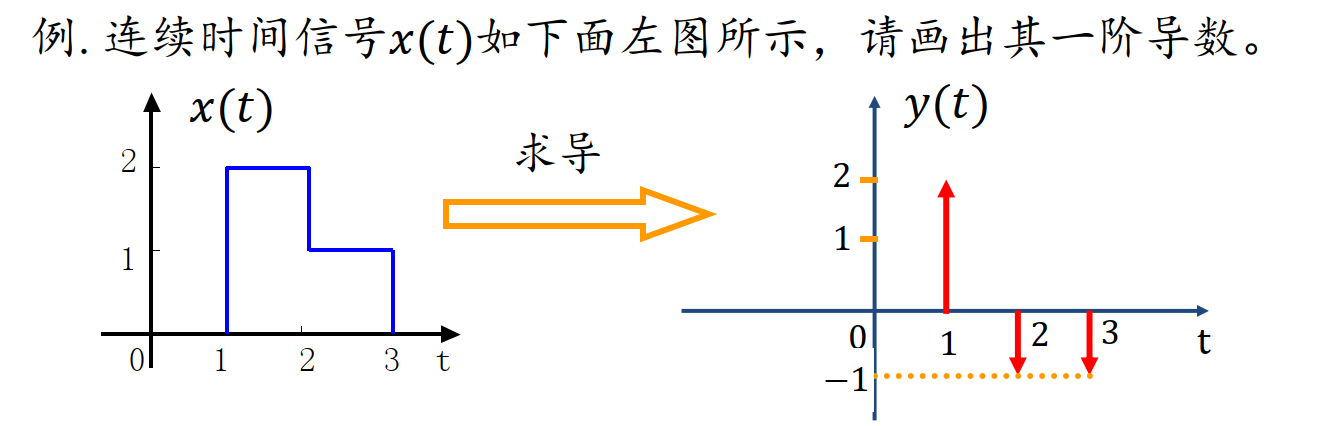
分段不连续的信号求导:导数不是普通函数段,而是在跳变点产生冲激,冲击量等于跳变的差值。
1.5 连续时间与离散时间系统
连续时间系统:输入信号和输出响应都是连续时间信号的系统。
- 例:微分方程
离散时间系统:输入信号和输出响应都是离散时间信号的系统。
- 例:差分方程
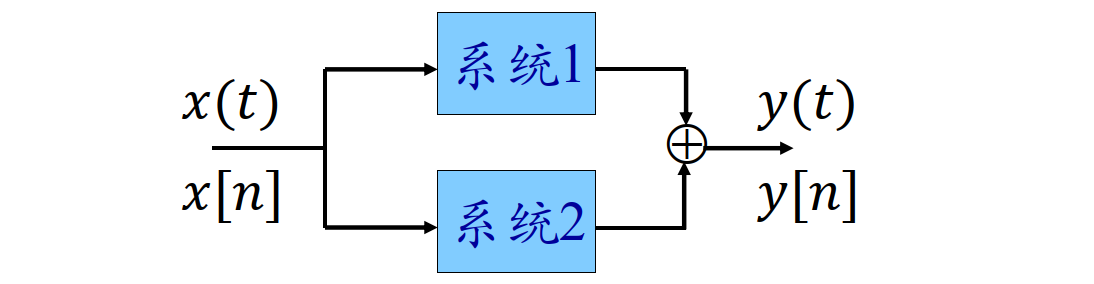
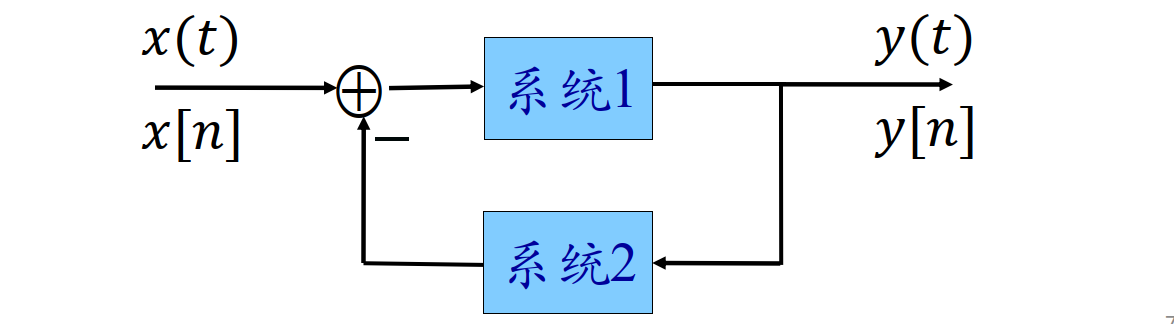
系统的互联:许多系统可以分解为若干简单系统的组合
- 级联:上游系统的输出是下游系统的输入

- 并联:总系统的输入作为多个系统的输入,多个系统的输出作为总系统的输出
- 反馈联结:系统的输出能够反馈到系统的输入
1.6 系统的基本性质
1.6.1 记忆性
无记忆系统:在任何时刻,系统的输入只与当前时刻的输入有关,而与时刻以外的输入无关。
记忆系统:系统的输入不仅与当前时刻的输入有关,而且与时刻以外的输入有关。
恒等系统:任何时刻,输出信号等于输入信号,属于无记忆系统。
- $y(t) = x(t)$ 或 $y[n] = x[n]$.
1.6.2 可逆性
可逆系统:一个系统对于不同的输入能产生不同的输出,即输入与输出一一对应。
反之为不可逆系统。
逆系统:一个可逆系统与另一个系统级联后,为恒等系统。那么下游系统是上游系统的逆系统。 
1.6.3 因果性
因果性:系统在任何时刻的输出只与当前时刻及此前的输入有关,而与此后的输入无关。
一般而言,实时的物理系统都是因果的。
1.6.4 稳定性
稳定系统:如果一个系统对于任意有界输入都产生有界输出,则为稳定系统,否则为不稳定系统。
1.6.5 时不变性
时不变性:当输入信号有一个时移时,系统的输出响应也产生相同时移,此外无其他变化,则该系统是时不变的。
形式化表述:$\forall t,, x(t) \to y(t)$,有 $x(t - t_0) \to y(t - t_0)$
检验方法:若输入 $x(t)$ 输出 $y(t)$,那么检验若输入 $x(t - t_0)$,输出是否为 $y(t - t_0)$.
1.6.6 线性
线性:$\forall x_1(t) \to y_1(t),, x_2(t) \to y_2(t)$,总有 $ax_1(t) + bx_2(t) \to ay_1(t) + by_2(t),\quad \forall a, b \in \mathbb{R/C}$
- 可加性:$x_1(t) + x_2(t) \to y_1(t) + y_2(t)$
- 齐次性:$ax_1(t)\to ay_1(t), \quad \forall a \in \mathbb{R/C}$

如果一个系统是线性的,则只要我们能够把输入信号分解成 若干个简单信号的线性组合,就可以对简单输出信号的线性组合而得到系统对原输入信号的响应。
$$x(t) = \sum_{k} a_k x_k(t),\quad x_k(t) \to y_k(t)\quad \Rightarrow \quad y(t) = \sum_k a_k y_k(t)$$
零输入-零输出特性:线性系统当输入为零时,输出也为零。
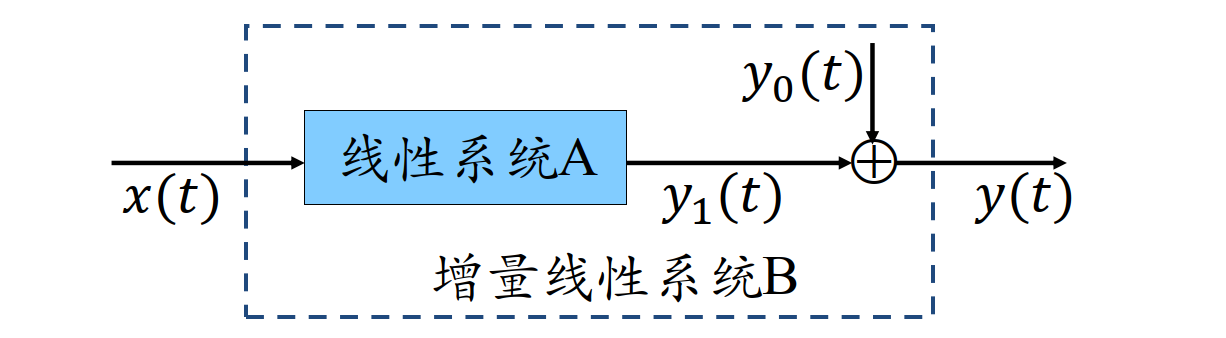
增量线性系统:输出响应的增量与输入信号的增量之间是线性的,即 $\displaystyle \frac{\Delta y}{\Delta x} = k$.
增量线性系统可以是做是线性系统 $x(t) \to y_1(t)$ 与和输入无关的响应 $y_0(t)$ 叠加的结果:
- 零状态响应:$y_0(t) = 0$ 时,$y(t) = y_1(t)$,则系统处于零初始状态,$y_1(t)$ 是零状态响应
- 零输入响应:$x(t) = 0$ 时,$y(t) = y_0(t)$,则称 $y_0(t)$ 为零输入相应
- 增量线性系统是 非线性系统。
本课程主要关注 线性时不变系统(Linear Time Invariant System, LTI)。
2.1 离散时间 LTI 系统:卷积和
用单位脉冲表示离散时间信号:用位移的单位脉冲信号叠加,可以表示任意的离散时间信号:$$x[n] = \sum_{k = -\infty}^{+\infty} x[k] \delta[n - k]$$ 单位脉冲响应:$\delta[n] \to h[n]$
如果我们知道了单位脉冲响应 $T(\delta[n]) = h[n]$,那么该离散 LTI 系统 $T$ 可以表示为 $$x[n] = \sum_{k = -\infty}^{+\infty} x[k] \delta[n - k] = x[n] * \delta[n] \quad \Rightarrow \quad y[n] = \sum_{k = -\infty}^{+\infty} x[k] h[n - k] = x[n] * h[n]$$ 一个 LTI 系统可以完全由它的单位脉冲响应 $h[n] = T\{\delta[n]\}$ 来表征。
常见 LTI 系统:
- 延时器:$x[n] * \mathbf{\delta[n - n_0]} = x[n - n_0]$
- 累加器:$\displaystyle x[n] * \mathbf{u[n]} = \sum_{k = -\infty}^n x[k]$
求卷积和 $\displaystyle y[n] = x[n] * h[n] = \sum_{k = -\infty}^{+\infty} x[k]h[n - k]$ 的步骤:
- 取 $x[k]$ 和 $h[k]$,其中 $k$ 是变量。
- 将 $h[k]$ 翻转,变为 $h[-k]$。
- 假设现在要算 $y[n]$,我们固定 $n$,则:
- 将 $h[-k]$ 平移 $n$(正则右移 $|n|$,负则左移 $|n|$),变为 $h[-(k - n)] = h[n - k]$
- 将 $x[k]$ 和 $h[n - k]$ 对应位相乘,并求和,最终得到 $y[n]$ 的值