Computer Vision Tasks
There are several core tasks in Computer Vision:
- Classification: assign one label to the whole image
- Semantic Segmentation: assign one semantic class to each pixel
- Object Detection: find objects and output bounding boxes + class labels
- Instance Segmentation: do detection and also output a mask for each object instance
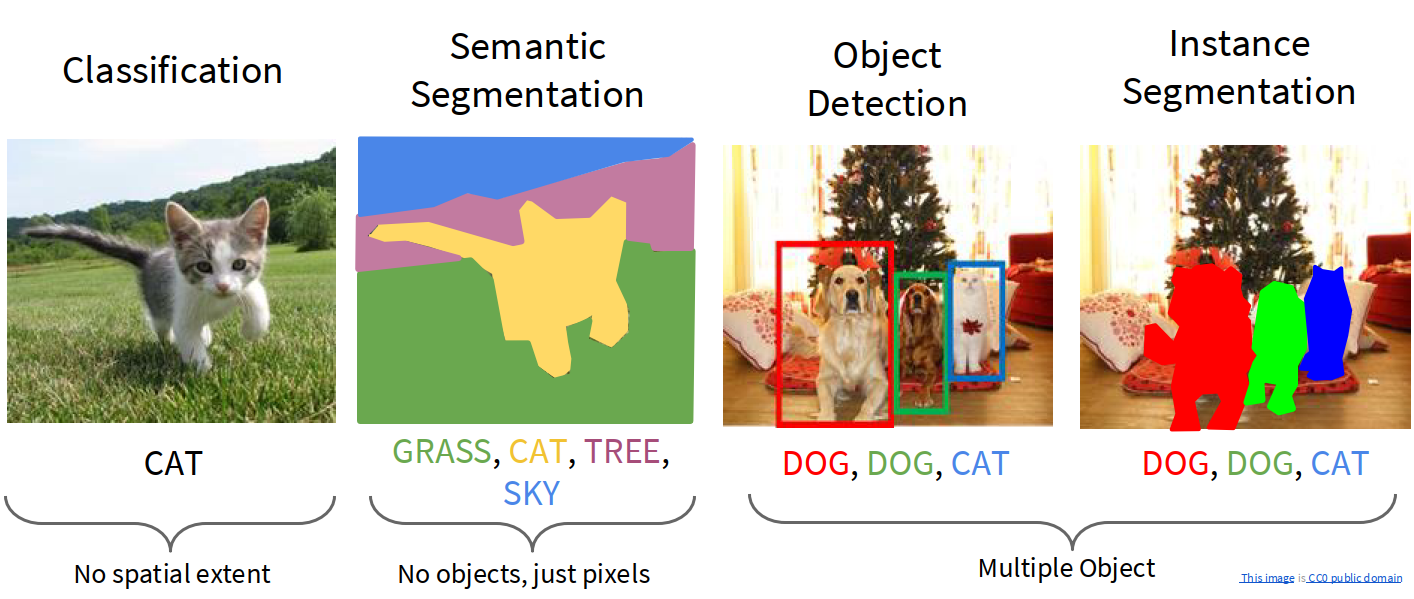
A useful distinction:
- classification has no spatial extent
- semantic segmentation cares about all pixels
- object detection cares about multiple objects and their boxes
- instance segmentation cares about multiple objects and their masks
Semantic Segmentation
The problem
In semantic segmentation, we want to classify every pixel in an image.
Training data:
- input image
- target segmentation mask
- each pixel in the mask is labeled by a semantic category such as grass, sky, cat, tree, road, etc.
At test time:
- input a new image
- predict one semantic class per pixel
Sliding window
A very early idea is:
- take a patch around one pixel
- run a CNN on the patch
- classify the center pixel
This gives local context, which is important because:
- a single pixel alone is often ambiguous
- surrounding pixels help identify the object / region
But this approach has an obvious problem:
Problem:
- very inefficient
- overlapping patches share most of their pixels
- the network repeatedly recomputes almost the same features
Fully convolutional idea
A much better idea is to process the whole image at once.
High-level idea: use a network made of convolutional layers so that we predict pixel labels for all positions in parallel.
If the network outputs class scores for each pixel, then:
- input shape: $3 \times H \times W$
- output score map: $C \times H \times W$
- final prediction: take
argmaxover the class dimension
This is the idea behind Fully Convolutional Networks (FCN).
The difficulty: resolution
Classification networks usually:
- use pooling / stride
- reduce spatial resolution
- go deeper with lower-resolution features
But segmentation requires:
- output resolution to match the input resolution
- fine spatial boundaries
So the network must contain both:
- downsampling to get larger receptive field and richer semantic features
- upsampling to recover spatial resolution
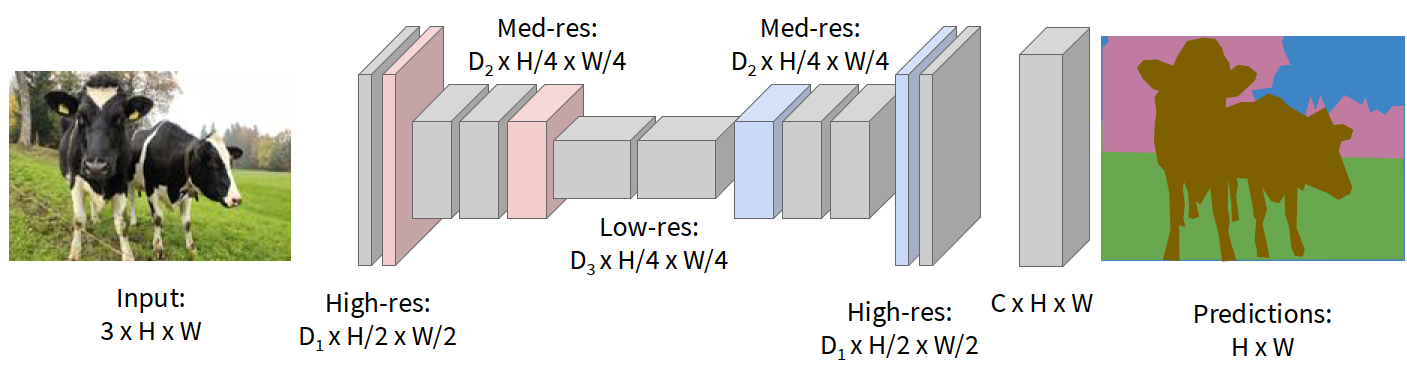
Downsampling and upsampling
A practical FCN-style segmentation network does:
- downsample the image several times
- process lower-resolution feature maps
- upsample features back to full resolution
- predict a per-pixel class map
Downsampling can be done by:
- pooling
- strided convolution
Upsampling can be done by:
- nearest-neighbor / unpooling
- max unpooling
- transposed convolution
In-network upsampling
1. Unpooling / nearest neighbor
Simplest way:
- copy each low-resolution value into a larger region
- no learned parameters
For example, a $2 \times 2$ input can be expanded into a $4 \times 4$ output by replication.
2. Bed of nails
Another simple option:
- place original values at sparse locations
- fill the rest with zeros
This is also not learnable.
3. Max unpooling
If downsampling was done by max pooling:
- remember the positions of maxima in the pooling layer
- when upsampling, place values back only at those recorded positions
This partially restores spatial structure.
4. Transposed convolution
A learnable upsampling method is transposed convolution.
The understanding of transposed convolution:
- ordinary strided convolution can be seen as learnable downsampling
- transposed convolution reverses this idea and becomes learnable upsampling
- each input value places a weighted copy of the filter into the output
- overlapping contributions are summed together
So transposed convolution is not simply “inverse convolution” in the strict algebraic sense. It is better understood as a learned operator that increases spatial resolution.
U-Net
A very important segmentation architecture is U-Net.
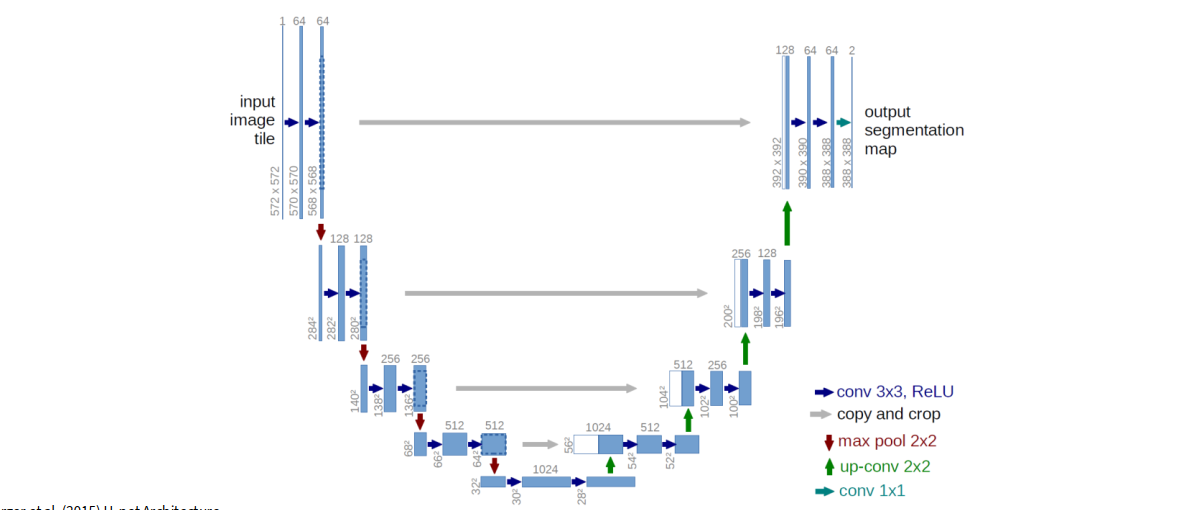
understanding of U-Net:
- the left side is the downsampling / encoder path
- the right side is the upsampling / decoder path
- skip connections copy high-resolution features from encoder to decoder
- decoder combines coarse semantic information with fine spatial information
Why skip connections help:
- encoder deeper layers have strong semantics but poor spatial detail
- early layers have fine local structure
- concatenating encoder features into decoder helps recover sharp boundaries

Summary of semantic segmentation
Semantic segmentation:
- predicts one category for each pixel
- does not separate different instances of the same class
- focuses on semantic labels, not object identity
Example:
- two cows in one image may both simply be labeled as
cow - the output does not need to distinguish cow A from cow B
Object Detection
Single-object detection
If there is only one object, the problem is relatively simple.
We can predict:
- class scores for the object category
- bounding box coordinates $(x, y, w, h)$
This is basically:
- classification + localization
Loss design:
- softmax loss for the class label
- regression loss (such as L2 / smooth L1) for box coordinates
- combine them into a multitask loss
So object detection naturally involves multiple objectives at the same time.
For multiple objects, the output size is not fixed:
- different images have different numbers of objects
- each object has its own class and bounding box
So a naive fixed-size output layer becomes awkward.
Sliding window over crops:
- take many crops / windows from the image
- run a CNN on each crop
- classify it as object / background
Problem:
- need to evaluate huge numbers of windows
- must search over locations, scales, and aspect ratios
- computationally very expensive
region proposals:
- candidate image regions likely to contain objects
- then only run the detector on these candidate regions
This was the key idea behind the R-CNN family.
R-CNN
Pipeline of R-CNN:
- generate ~2000 region proposals by selective search or another proposal method
- warp each proposed region to a fixed size
- run each region independently through a ConvNet
- classify each region
- regress bounding-box corrections
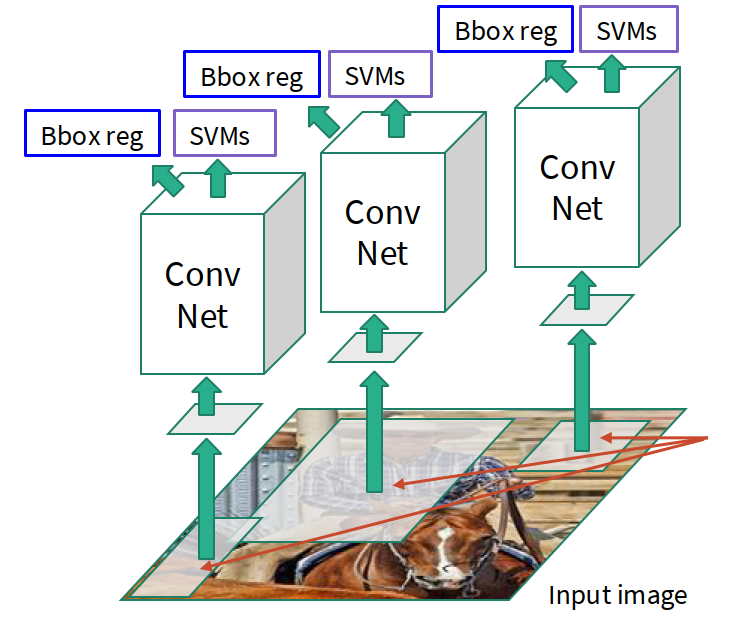
The understanding of R-CNN:
- good idea: convert detection into classification on candidate regions
- bad part: thousands of proposals mean thousands of CNN forward passes
Main problem:
- very slow
- huge repeated computation
Fast R-CNN
Fast R-CNN improves this by sharing convolution.
Basic idea:
- run the whole image once through the backbone CNN
- get feature maps for the image
- project each RoI onto the feature map
- crop and resize region features
- classify each region and regress box offsets This is much better because:
- heavy convolution is shared across all regions
- only the later region-specific head is run per proposal
RoI Pool and RoI Align
In Fast R-CNN, we need a way to convert variable-size regions on the feature map into fixed-size features.
RoI Pool
RoI Pool does:
- project proposal onto the feature map
- snap region boundaries to grid cells
- divide region into small subregions
- max-pool inside each subregion
This gives fixed-size region features.
But there is a problem:
- snapping to grid introduces misalignment
- small localization errors matter, especially for masks
RoI Align
RoI Align fixes this by:
- not snapping to grid
- sampling regularly using bilinear interpolation
- preserving more accurate spatial alignment
Region Proposal Network (RPN)
Instead of hand-designed proposal algorithms, we can let the CNN predict proposals itself.
A Region Proposal Network does:
- place anchor boxes at each feature-map location
- predict whether each anchor contains an object
- regress box offsets for positive anchors
- rank proposals by objectness score
- keep top proposals
In practice:
- use multiple anchors of different scales / aspect ratios
- output objectness + box transform for each anchor
This makes proposal generation part of the network itself.
Faster R-CNN
The understanding of Faster R-CNN:
- first stage: propose candidate boxes
- second stage: classify proposals and refine boxes
- this is why Faster R-CNN is called a two-stage detector
Typical losses:
- RPN object / background loss
- RPN box regression loss
- final classification loss
- final box regression loss
Single-stage detectors: YOLO / SSD / RetinaNet
Another direction is to skip the second stage and predict detections directly.
High-level idea: divide the image into a grid, and directly predict boxes + confidence + class scores.
Within each grid cell:
- predict whether there is an object
- regress bounding boxes
- predict class probabilities
Advantages:
- very fast
- one forward pass
- suitable for real-time applications
Tradeoff:
- often less accurate than strong two-stage detectors
- especially for small / crowded objects in older versions
DETR
A more modern idea is to use Transformers directly for object detection.
DETR:
- outputs a set of predicted boxes directly
- does not use anchors
- does not use box proposal stages in the old style
- matches predictions to ground truth with bipartite matching
- trains box coordinates end-to-end
The understanding of DETR:
- object detection becomes a set prediction problem
- Transformer decoder queries correspond to possible objects
- each query tries to explain one object or “no object”
This is conceptually elegant because it removes many hand-designed detection components.
Detection tradeoffs
In object detection, there are many design choices:
- backbone architecture
- image size
- proposal mechanism
- two-stage or single-stage
- anchor design
- speed vs accuracy balance
A broad empirical takeaway:
- Faster R-CNN: slower but usually more accurate
- SSD / YOLO: faster but historically a bit less accurate
- bigger / deeper backbones often improve performance
Instance Segmentation
Instance segmentation combines:
- object detection
- per-instance mask prediction
So unlike semantic segmentation:
- we do not only label pixels
- we also separate different instances of the same class
Example:
- two dogs should become two different masks, not one shared “dog” region
Mask R-CNN
Mask R-CNN extends Faster R-CNN by adding a mask head.
Pipeline:
- backbone CNN + RPN generate proposals
- RoI Align extracts fixed-size aligned region features
- one branch predicts class scores
- one branch predicts box coordinates
- one small mask network predicts a binary mask for each class
Typical output of mask head:
- per-RoI mask such as $28 \times 28$
- one mask per class
- during inference, keep the mask corresponding to the predicted class
The understanding of Mask R-CNN:
- Faster R-CNN already tells us where the object is
- mask head tells us which pixels inside the box belong to the object
- RoI Align is crucial because masks are sensitive to pixel-level alignment
Visualization and Understanding
Besides building models, we also want to understand:
- what the model learns
- which features it uses
- which image regions matter for a prediction
First-layer filter visualization
For the first convolution layer, filters can be directly visualized because:
- they usually have 3 input channels (RGB)
- the filter itself can be displayed as a small image
Typical result:
- edge detectors
- color blobs
- oriented patterns
- simple texture filters
The understanding of first-layer filters:
- early CNN layers learn low-level visual primitives
- these are similar across many architectures
- later layers become more abstract and are harder to visualize directly
Saliency maps
A saliency map asks:
Which pixels matter most for a particular class score?
Method:
- do a forward pass and compute the class score $S_c$
- compute gradient of the class score with respect to input pixels
- take absolute value and often max over RGB channels
Mathematically: $$ M = \max_{ch} \left| \frac{\partial S_c}{\partial I} \right| $$
where $I$ is the input image.
The understanding of saliency maps:
- if a pixel has large gradient magnitude, changing that pixel changes the class score a lot
- therefore that pixel is important for the prediction
CAM (Class Activation Mapping)
CAM gives a class-specific heatmap from convolutional features.
Setup:
- suppose the last convolution feature map is $f \in \mathbb{R}^{H \times W \times K}$
- global average pooling gives pooled features $F \in \mathbb{R}^{K}$
- final linear classifier has weights $w \in \mathbb{R}^{K \times C}$
Then $$ F_k = \frac{1}{HW} \sum_{h,w} f_{h,w,k} $$
and class score $$ S_c = \sum_k w_{k,c} F_k $$
Substituting gives $$ S_c = \frac{1}{HW} \sum_{h,w} \sum_k w_{k,c} f_{h,w,k} $$
So define the class activation map $$ M^c_{h,w} = \sum_k w_{k,c} f_{h,w,k} $$
This heatmap tells us which spatial locations support class $c$.
Limitation of CAM:
- only works naturally for the last convolution layer in a specific architecture form
- requires global average pooling + linear classifier structure
Grad-CAM
Grad-CAM generalizes CAM to arbitrary layers.
Steps:
- choose any layer with activations $A \in \mathbb{R}^{H \times W \times K}$
- compute gradient of class score with respect to activations $$ \frac{\partial S_c}{\partial A} $$
- global-average-pool these gradients over spatial dimensions to get channel weights $$ \alpha_k = \frac{1}{HW} \sum_{h,w} \frac{\partial S_c}{\partial A_{h,w,k}} $$
- combine activations using these weights $$ M^c_{h,w} = \operatorname{ReLU}\left(\sum_k \alpha_k A_{h,w,k}\right) $$
The understanding of Grad-CAM:
- gradients tell us which channels matter for the chosen class
- activations tell us where those channels are active
- combine them to get a class-specific localization heatmap
Guided backprop
Another interpretation method is guided backprop.
Basic idea:
- pick a specific intermediate neuron / channel
- compute gradient of that neuron with respect to image pixels
- when backpropagating through ReLU, keep only positive gradients
This tends to produce sharper-looking visualizations than plain backprop.
Visualizing ViT features
For ViTs, interpretability often comes more naturally from attention:
- attention maps show which patches look at which other patches
- patch tokens preserve sequence structure
- we can visualize how different heads attend over the image
This is one reason transformer-style models are often easier to inspect in terms of token interaction.
Glossary
- semantic segmentation n. 语义分割
- instance segmentation n. 实例分割
- object detection n. 目标检测
- localization n. 定位
- bounding box n. 边界框
- multitask loss n. 多任务损失
- region proposal n. 区域候选 / 候选框
- RoI (Region of Interest) n. 感兴趣区域
- objectness n. 含有目标的概率
- anchor box n. 锚框
- transposed convolution 转置卷积 / 反卷积
- unpooling 反池化 / 上采样
- skip connection n. 跳跃连接
- saliency map n. 显著图
- class activation map (CAM) n. 类激活图
- Grad-CAM n. 基于梯度的类激活图
- guided backprop n. 引导反向传播